

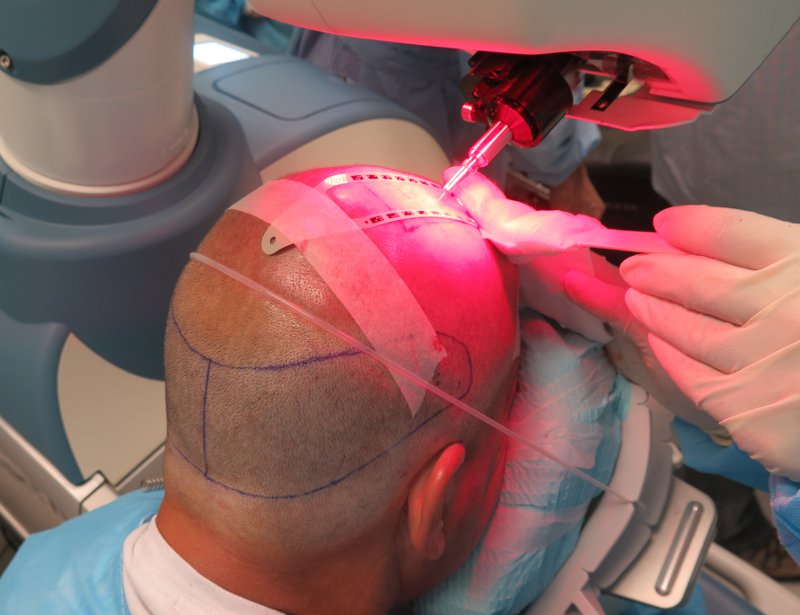
Dr. Bernstein performing robotic hair transplant with the ARTAS Robotic System
Robotic hair transplant surgery is a significant advance in the technology of the Follicular Unit Extraction (FUE) procedure.
In Robotic FUE, the ARTAS® iX Robotic System automates two key steps in an FUE hair transplant; follicular unit graft harvesting and recipient site creation. The automation of these two steps enables surgeons to perform FUE with unparalleled precision and consistency and allows for the maximum preservation of follicles. Robotic hair transplants have the same advantages manual FUE procedures have over traditional hair transplants – no linear scar and no post-operative limitations on physical activity – but, in addition, the ARTAS robot eliminates risks of human error.
The robot’s optical three-dimensional guidance system and dual punch mechanism first locate then extract follicular units according to specifications programmed by the physician. They do so hundreds to thousands of times per session with consistency and accuracy impossible to duplicate with the human hand.
They also create recipient sites, where follicular unit grafts are placed, according to an aesthetic plan designed by the physician and programmed into the robot.
Pioneered at Bernstein Medical
 Dr. Bernstein discussing the newest capabilities of the ARTAS robotic system to an audience of hair restoration surgeons in California
Dr. Bernstein discussing the newest capabilities of the ARTAS robotic system to an audience of hair restoration surgeons in CaliforniaRobotic FUE hair transplant procedures were pioneered by Dr. Bernstein and his colleague Dr. Rassman. Bernstein Medical was among the first facilities in the world to use the ARTAS robot to perform FUE, and the first to use the new ARTAS iX system. Today, every FUE procedure at Bernstein Medical uses the ARTAS iX system. We were named an ARTAS Clinical Center of Excellence in 2013.
As a medical adviser to Restoration Robotics, Dr. Bernstein collaborates with the robot’s engineers and developers to improve its hardware and software systems. Bernstein Medical is a beta-test site for this innovative technology and numerous advances were developed and tested at our facility.
In addition to enhancing the core technology, new applications introduced at our facility include robotic recipient site creation, follicular unit graft selection, and smaller punch sizes.
We are the first to use the upgraded ARTAS iX system that has improved both hardware and software capabilities to speed up the procedure by 20%.
How the ARTAS Robot Works
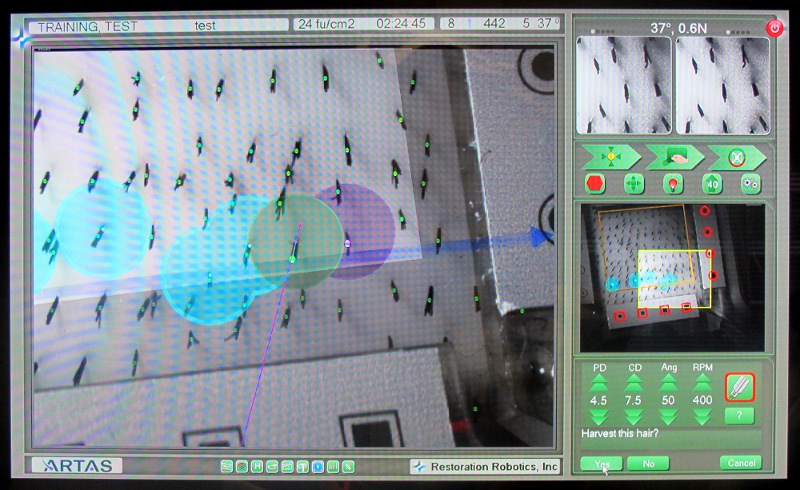 ARTAS robot’s optical imaging system selects the next follicular unit for harvesting
ARTAS robot’s optical imaging system selects the next follicular unit for harvestingThe patient is first given local anesthesia to the area to be harvested. With the patient seated in the robotic chair, the physician applies the tensioner, a small rectangular picture frame-like device, to the back of the scalp. The robotic arm automatically positions itself to the donor area. The system then orients the punch tool to the scalp and it scans the skin for a follicular unit to extract. Once the robot targets a follicular unit for extraction, a dual punch mechanism is deployed with the inner sharp tool scoring the skin around the follicular unit and the outer blunt tool dissecting the graft from the surrounding tissue.
The optical system then scans for the next follicular unit to be removed, the arm positions the tool over the next unit, it aligns the instrument with the follicles, and the extraction step is repeated. This sequence continues until the robot is finished harvesting from within the area defined by the tensioner.
When harvesting from the area is complete, technicians manually remove the grafts from the scalp and the tensioner is moved to a virgin area for a new round of harvesting. This continues until sufficient grafts are harvested for the hair restoration.
The sequence is similar to robotic recipient site creation, except instead of the punch tool dissecting follicular units in the skin, it is used to create recipient sites according to exact specifications programmed by the surgeon.
For a more in-depth review of how the robotic hair transplant system works, visit the page on ARTAS Robotics.
Video of the Robotic Hair Transplant Procedure
Advantages of Robotic FUE
- More about Robotic Hair Transplants
- FAQ
- News
- Answers
- Video
- Physician Consult
FUE, a type of hair transplant in which follicular units are extracted from the donor area one at a time, was first described and popularized by Drs. Rassman and Bernstein in 2002. ((Rassman WR, Bernstein RM, McClellan R, Jones R, et al. Follicular Unit Extraction: Minimally invasive surgery for hair transplantation. Dermatol Surg 2002; 28(8): 720-7.)) When performed using hand-held instruments, FUE is a labor-intensive process that requires surgeons to extract hundreds to thousands of follicular units and create an equal number of recipient sites during sessions that can last over eight hours. This subjects the patient to significant human variability and risk of error. ((Bernstein RM, Rassman WR. Anderson KW. Follicular Unit Extraction Megasessions: Evolution of a technique. Hair Transplant Forum International 2004; 14(3): 97-99.))
Below, we take a closer look at the benefits of using the ARTAS System to automate follicular unit graft harvesting and recipient site creation.
Graft Harvesting
Manual FUE graft harvesting requires precision and focus on the part of the physician with very little margin of error. The doctor must select each follicular unit, estimate the angle of the hair, center the extraction tool over the unit, and incise the skin around the follicular unit at the correct angle and depth. This sequence needs to be repeated hundreds or thousands of times with the same level of accuracy and focus.
 The ARTAS System harvesting follicular units from the donor area
The ARTAS System harvesting follicular units from the donor areaThe smallest deviation with a hand-held instrument can result in transection (damage) to a follicular unit. Since the growth center of a hair follicle lies in the base of the follicle, the entire follicle must be removed intact or it will be of little value in the transplant. Extracting thousands of grafts over multiple hours with the precision required to minimize transection is physically and mentally taxing even for the most highly skilled surgeon.
 Robotically-harvested 2-hair follicular unit grafts
Robotically-harvested 2-hair follicular unit graftsThe robot’s optical guidance system locates the follicular unit for extraction and the robotic arm positions the punch tool at the correct angle. The two-step sharp/blunt punch scores the skin then penetrates deeper into the tissue at the optimal depth to ensure that the integrity of the follicular unit is preserved. ((Bernstein RM. Robotic Hair Transplants. The Link 2013; 5: 6-7.)) It repeats this process with microscopic precision without tiring. The robot’s graft selection algorithm further enhances harvesting efficiency by increasing the number of hairs extracted per harvest attempt.
Recipient Site Creation
 The ARTAS Robot creating recipient sites according to the physician’s plan
The ARTAS Robot creating recipient sites according to the physician’s planManual recipient site creation requires that the surgeon creates hundreds to thousands of sites in the scalp where follicular units are placed. These sites are crucial in determining the aesthetics of the transplant because they determine how the transplanted hair will grow. They must be created with a specific distribution and spacing and with the appropriate depth as this will allow the hair to grow at the correct angle and direction. The pattern created by the surgeon must be natural and integrated with existing hairs. Every site must be made to exact specifications or the transplanted follicle might not survive. As with harvesting, it is physically and mentally taxing to perform such a high-precision task repeatedly for thousands of grafts.
In robotic recipient site creation, the surgeon programs the design plan and other specifications into the ARTAS robot. The computer-driven guidance mechanism then positions the robotic arm. In a microsecond, the robot locates an area of bald scalp a specific distance from surrounding follicles and deploys the cutting tool to create the site at the exact angle and depth programmed by the surgeon. As it proceeds, it calculates the number of recipient sites that it needs to create in order to achieve the ideal density of transplanted hairs. All of this happens at such a brisk pace and with such 3-dimensional accuracy that the ARTAS system can create over 1,000 sites per hour without getting tired, losing focus, or damaging existing hairs. ((Bernstein RM, Wolfeld MB, Zingaretti G. Robotic recipient site creation in hair transplantation. Hair Transplant Forum Intl. 2014; 24(3): 95-97.))
Potential Advantages of Robotic FUE Over Manual Procedures
The robot harvests follicles and creates recipient sites with greater precision and consistency than can be accomplished manually and maintains this high level of performance for the entire duration of the procedure. As a result, the ARTAS System can improve the outcome of FUE hair transplants over manual techniques. Below is a list of some of the potential advantages of the hair transplant robot over manual techniques.
- Increased accuracy of graft harvesting
- Reduced harvesting time
- Increased survival of harvested follicular units
- Minimizes wounding in graft harvesting
- Increased accuracy in creating recipient sites
- Avoids damaging existing hairs during recipient site creation
Robotic Hair Transplants at Bernstein Medical
 Dr. Bernstein with the ARTAS Robot during recipient site creation
Dr. Bernstein with the ARTAS Robot during recipient site creationAs a hair transplant pioneer and one of the first to use robotic technology in surgical hair restoration, Dr. Bernstein became intimately involved with Restoration Robotics and has played a key role in improving the ARTAS system for robotic hair transplant practitioners around the world. He is a medical adviser to the company and Bernstein Medical is a beta-test site for advances in the robot’s hardware and software systems.
In addition to improvements to the core system, several major advances were introduced at Bernstein Medical. These include robotic recipient site creation, an enhanced user interface, custom punch sizing, long-hair Robotic FUE, pre-making recipient sites, and a variety of other important modifications, some of which are described below.
Custom Punch Size
Bernstein Medical was the first practice to offer customized punch sizes to suit the individual patient. Punches of 0.8mm and 0.9mm (the standard is 1.0mm) shorten healing time, decrease donor scarring, and increase the number of follicular units that can be harvested without damaging neighboring follicles. The smaller punch also creates grafts that require less trimming of the tissue that surrounds the follicular unit. Some patients, especially African-Americans, have less transection with the larger punch, so selecting the appropriate tool for each patient is an important decision that the physician must make, as this can have a significant effect on the outcome of the transplant.
Long-Hair Robotic Hair Transplant
With the long-hair technique, the patient grows his hair on the back and sides of the scalp so it can cover the harvested area. On the day of the procedure, the surgeon lifts up the hair, clips a long thin band of donor hair, then extracts follicular units from this limited region of the scalp. After the procedure, the patient simply combs down their hair to cover the donor zone. ((Bernstein RM. Long-Hair Robotic FUE. Restoration Robotics White Paper. May 2015.))


Long-hair robotic hair transplant procedures are generally performed through one long band or through two separate parallel bands above and below a linear donor scar. Corners are generally rounded and the edges are feathered using the ARTAS system so the harvested area blends in with the surrounding hair. Read about Long-Hair Robotic FUE and see more before and after photos.
Graft Selection Algorithm
Early iterations of the ARTAS robot selected follicles for extraction at random, regardless if they were a 1-, 2-, 3-, or 4-hair follicular unit. But extracting 1-hair follicular units is less efficient because the harvest attempt only yields one follicle. Dr. Bernstein worked with Restoration Robotics to develop an algorithm that would enable the robot to skip over the 1-hair units (or any other size if desired). By avoiding the smallest follicular units, the robot harvests more hairs per extraction attempt and creates less wounding and scarring in the donor area. ((Bernstein RM, Wolfeld MB. Robotic follicular unit graft selection. Dermatologic Surgery 2016; 42(6): 710-14.)), ((Bernstein RM. ARTAS Robotic System provides a comprehensive suite of tools to minimize donor area scarring following hair transplantation. Restoration Robotics White Paper. September 2014.))
When smaller units are needed, such as to create a natural-looking hairline, the robotic graft selection algorithm is placed on OFF. Alternatively, robotically-extracted units of three or more hairs can be dissected into smaller units by a technician. Since the Bernstein Medical team is expert at stereo-microscopic dissection from its years of performing FUT hair transplants, we often dissect larger follicular units into smaller ones to enhance the outcome in cosmetically important areas of the scalp.
Pre-Making Recipient Sites
Another important modification of the robotic hair transplant technique introduced at Bernstein Medical is pre-making recipient sites. ((Bernstein RM, Rassman WR. Pre-making recipient sites to increase graft survival in manual and robot FUE procedures. Hair Transplant Forum Intl. 2012; 22(4): 128-130.)), ((Bernstein RM. Integrating Robotic FUE into a Hair Transplant Practice. Hair Transplant Forum Intl. 2012; 22(6): 228-229.)) Using this strategy, recipient sites are created before follicular units are extracted in a typical one-day procedure (or at the beginning of the first day in a two-day procedure). This enables the grafts to be placed into recipient sites as soon as harvesting is complete. The technique minimizes the time grafts are outside the body, increases visibility when placing the grafts (due to less bleeding), minimizes graft popping, and allows the recipient area to start the healing process earlier. A better environment for newly transplanted grafts increases the chances that they will survive the transplant and increases the likelihood of an excellent aesthetic outcome.
Techniques Using the ARTAS Robot: Feathering and Focal Harvesting
Feathering

The above photo shows the ARTAS Robot being used to feather the donor extraction on the sides of the scalp. The purpose is to make the harvested area blend imperceptibly into the surrounding scalp. This is particularly important on the sides of the scalp where the hair may be thin and less able to camouflage the harvested sites (compared to the more dense hair in the back of the scalp).
Focal Harvesting

The above photo shows results from the ARTAS Robotic System that had been programmed to increase the harvested area beyond that of the patients first FUE (see area just below trimmed hair), for the purpose of obtaining additional grafts. The lower area of the picture shows the Robot focusing on areas that had been missed in the previous FUE session.



